RetroShape: Leveraging Rear-Surface Shape Displays for 2.5D Interaction on Smartwatches
Da-Yuan Huang, Ruizhen Guo, Jun Gong, Jingxian Wang, John Graham, De-Nian Yang, Xing-Dong Yang ACM Symposium on User Interface Software and Technology (UIST), 2017 [PDF] [Video]
Motivation
Smartwatches provide quick access to short-time entertainment applications, especially when users are on-themove, e.g. in a bus or train. However, user experience in such applications is limited due to the small screen area and limited input and output options. While smartwatch visual and auditory technologies have improved substantially, the potential of smartwatch-enabled haptics in video and game applications remains to be exploited. We leverage the user’s skin under the watch face for sensing haptic output with collocated visual content. Our approach enhances the viewing experience on a smartwatch using a shape-changing tactile display on the rear surface of the smartwatch
Prototype
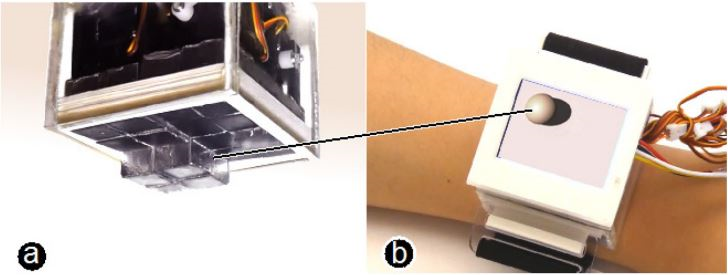
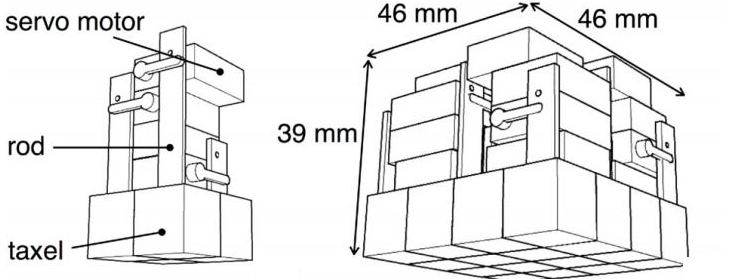
RetroShape is composed of a 4 × 4 linearly actuated pin array. The pins were 3D printed, and have a 10 × 10 mm footprint with no space between them. Each pin is connected to miniature servo motors, which can extend to 7 mm from their resting position. Each servo motor weights 1.7 g, and has a dimension of 14 × 6.2 × 18 mm (l × w × h). Under the working voltage of 3.7v, each servo motor can exert a twisting force of 75g and rotate in a maximum speed of 1200° per second. The motors are controlled using an Adafruit 16-Channel 12-bit PWM/Servo Shield, which was connected to an Arduino Mega board, communicating to a MacBook Pro laptop. Software was written in Processing.
| Prototype | 3D model |
|---|---|
 |
 |
Selected Press Coverage
EurekAlert && ACM TechNews SIGCHI Edition (November 2017): Dartmouth to debut wearables that warn and wow at UIST 2017